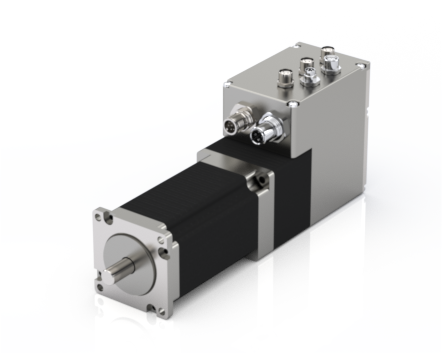
ECOMPACT 23E41, decentralized high torque NEMA 23 servo drive
Technical specifications
| Flange | 56.4 mm |
| Max. DC link voltage | 60 VDC |
| Maximum speed | 2000 rpm |
| Peak torque | 3.2 Nm |
| Stall torque | 2.2 Nm |
Compact servo drive - Motor and servo amplifier in one
Overview
The ECOMPACT 23E41 is a decentralized compact servo drive that combines motor, feedback system and servo amplifier in a single NEMA 23 housing. As part of the ECOMPACT 23E family, it provides closed loop torque, speed and position control directly on the axis, so the power electronics move from the control cabinet to the machine frame.
With a 56.4 mm flange, peak torque of 3.2 Nm, stall torque of 2.2 Nm and maximum speed of 2000 rpm, the 23E41 is the high torque variant within the 23E range, offering a strong torque to size ratio for dynamic positioning tasks in the low voltage class up to 60 VDC. This allows many axes to run in direct drive without an additional gearbox, which supports precise, backlash free motion and a compact mechanical layout.
Depending on configuration, the ECOMPACT 23E41 can be equipped with incremental or absolute encoders, holding brake, gear and different connector options, so engineers can match feedback, holding torque and connection style to the application. Direct mounting on the machine reduces wiring complexity and cabinet space, and simplifies the creation of modular, repeatable axis building blocks.
Advantages
- Reduces cabinet space and wiring effort by integrating the servo amplifier in the motor housing and using short local cables instead of long shielded motor leads, which also lowers thermal load in the cabinet.
- Delivers high torque in a compact frame with up to 3.2 Nm peak torque in a NEMA 23 footprint, so many applications can run direct drive without an external gearbox.
- Supports modular machine design because each axis becomes a self contained motion node that can be assembled, tested and reused as a standard module.
- On drive control intelligence with torque, speed and position control, graphical sequence programming and digital I/O allows local handling of motion tasks that would otherwise require a small PLC.
- Eases commissioning and diagnostics through ECOSTUDIO, which offers parameter wizards, an integrated motor and encoder database and oscilloscope functions for real time analysis and tuning.
Where it fits
- High dynamic positioning axes in machines that need strong torque in limited space, for example indexing units, handling axes or modules in multi axis systems.
- Applications that benefit from direct drive where higher torque allows elimination or downsizing of gearboxes, improving stiffness and reducing mechanical wear.
- Decentralized, low voltage systems in the 24 to 60 VDC class where drives are mounted on the frame and cabinet space is limited.
- Industrial environments with IP40 requirements where robust mechanics, defined load capacities and insulation class B are sufficient and there is a focus on compact, modular axis design.
Interfaces
- Control modes for torque, speed and position control with configurable limits, so motion behavior can be matched to different loads and duty cycles.
- Fieldbus connectivity with DS402 drive profile support via CANopen and EtherCAT, enabling integration into common PLC architectures and synchronized multi axis systems.
- Digital I/O with 5 digital inputs and 2 digital outputs, including insulated channels that help separate signal grounds and reduce the risk of ground loops in larger machine frames.
- Commissioning and monitoring via ECOSTUDIO with wizard guided setup, an integrated motor and encoder database, extensive oscilloscope functions and active monitoring of short circuit, voltage, temperature and i²t values.
- Series options for encoders, brake and gear so the same ECOMPACT 23E41 platform can be adapted to different safety requirements, load cases and mechanical interfaces without changing the basic axis concept.